Catmull-Rom
Catmull-Rom сплайни
1. Въведение
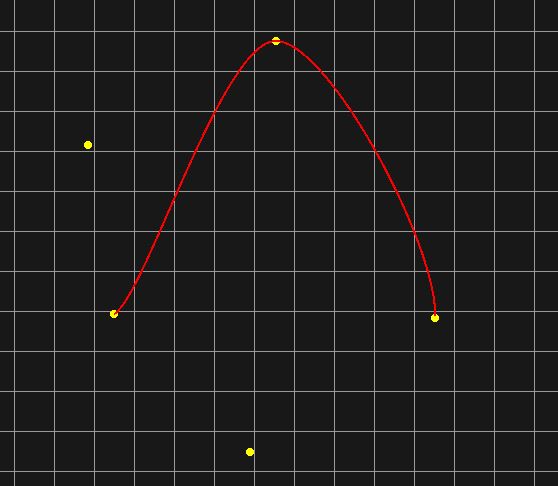
Catmull-Rom сплайновете са интерполационни криви, които преминават през даден набор от точки. Те се използват широко за изглаждане на траектории в графични приложения.
Даден е набор от точки P0, P1, P2, ... , Pn, където n >= 4, и целта е да се конструира плавна крива, която минава през тях.
2. Алгоритъм за построяване на Catmull-Rom сплайн
Точките се разделят на групи от по четири последователни точки:
P(i-1), P(i), P(i+1), P(i+2).
Кривата трябва да минава през P(i) и P(i+1), като осигурява плавни преходи между сегментите.
Изчисляване на тангентните вектори
За да определим формата на кривата, изчисляваме тангентните вектори в точките P(i) и P(i+1):
- T1 = (P(i+1) - P(i-1)) / 2
- T2 = (P(i+2) - P(i)) / 2
Тези вектори представляват приближена първа производна на кривата в съответните точки.
Построяване на гладък сегмент чрез алгоритъма на de Casteljau
Прилагаме алгоритъма на de Casteljau, за да построим кубичен Безиеров сегмент с контролни точки:
- B0 = P(i)
- B1 = P(i) + T1 / 3
- B2 = P(i+1) - T2 / 3
- B3 = P(i+1)
Стъпка 1: Първа итерация
- B0(1) = (1 - t) * B0 + t * B1
- B1(1) = (1 - t) * B1 + t * B2
- B2(1) = (1 - t) * B2 + t * B3
Стъпка 2: Втора итерация
- B0(2) = (1 - t) * B0(1) + t * B1(1)
- B1(2) = (1 - t) * B1(1) + t * B2(1)
Стъпка 3: Последна итерация
- B0(3) = (1 - t) * B0(2) + t * B1(2)
Намерената точка B0(3) лежи върху търсената крива.
3. Генериране на кривата
Чрез промяна на параметъра t в диапазона [0,1], се генерира един сегмент от сплайна. Процесът се повтаря за следващия сегмент, използвайки следващите четири точки, докато всички точки бъдат обработени.
Този метод гарантира гладка и непрекъсната интерполация, което го прави идеален за анимации, генериране на траектории и разработка на игри.